
私は数年前のページェントで、
RCアエロデザイン研究所(RAD)製のオートジャイロ「きらら」の飛行を見てから、
翼の無い純粋なオートジャイロをいつか作りたいと思っていました。
世界的に見ても、ほとんどRCオートジャイロのキットが売られていないことや、
自作する人も非常に少ないことから考えても、一筋縄では飛ばないことは明らかです。
オートジャイロの自作は、今までの自作機よりもかなり難しいと思われ、
どんなことが起こるのか、どんな結果が出るのか、
まったく予想が出来ませんので非常に楽しみです!
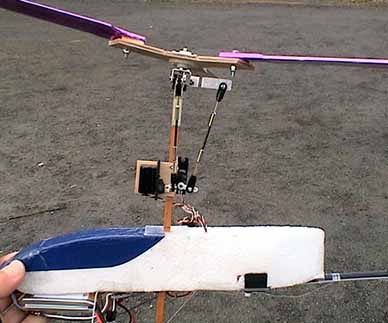
ベースはぷちトレーナー
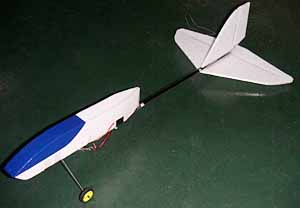
EPPブロックを切り出し、ぷちトレーナーの胴体だけを作りました。
ぷちトレーナーは落ちてもほとんど壊れませんし、機体重量も非常に軽くて尾翼も大きめなで、
オートジャイロにしやすいかもしれません。

「推力不足のため飛ばない」と言うのは避けたかったので、パワーに余裕がある自作CDモーターを使いました。

ローター回転が上がるまで、しばらくタキシングで走り回る必要があるため、尾輪を付けました。
取り付けは簡単にグラステープで留めただけです。
もちろん、ラダーに連動して操舵が出来ます。

ローター軸は、GWSギアダウンユニットの不要な部分を切り取った物を利用しました。
アルミ板を曲げてハブを作り、クリップ400用のローターを取り付けてあります。
最適な角度はよく分からないので適当だったりする・・・。 (^_^;)
完成!

生まれて初めてのオートジャイロの完成です。
なかなか雰囲気出ているかも。 o(^-^)o
初めてのテスト(飛行?)

近所に広い駐車場があるのでテストしてみました。
飛ぶのが難しくてもジャンプ位は出来るかもしれません。
「いきなり飛んだら面白くないなー」と考えていましたが、
案の定、全然飛びませーん! o(;`O´)o
実験機はこうでなくっちゃ面白くないですね。(笑)
色々問題点が解ってきました。
ほとんどローターからの揚力を感じませんので、ローターをもっと大きく作り直したいと思います。
また、脚はかなり幅を広げないと、タキシングしているだけで頻繁に倒れます。
でっかいローターを作って実験

スチレンペーパーを使ったローターを作りました。
ブレードも4枚に増やしてありますし、ローター径も大幅にアップしたので、
機体を浮かせるだけの揚力はありそうです。
機体を持ったまま駆け出して、ローター回転が充分に上がった所で手投げしてみましたが、
すぐに激しい左ロールでナイフエッジ状態になり墜落しました。
飛行時間0.5秒。 その飛行距離は1mちょっと・・・。
何度やっても左に傾き、ナイフエッジになり墜落します。
うーん・・・。
オートジャイロって、私が理解しがたいバランスで飛行しているようです。
面白くなってきました! (笑)
ローターに働く前進飛行中の揚力の不均衡が原因であることには間違いないのですが、
今日のテスト飛行の場合は、高揚力であるはずの左の方が激しく下がります。
普通の機体のように水平に投げたのがいけなかったのかもしれません。
フラッピング効果を考えて柔らかいスチレンペーパーでローターを作りましたが、
工作精度もいい加減ですし、剛性のバランスなどにも独特のノウハウがあるのかもしれません。
付け根にゴムダンパーをつけることも考えてみようと思います。
とりあえずコーニング角を少し増して、ピッチも減らし、
ローター取り付け角度も調整してみたので、この状態でまたテストしてみます。
シーソーヘッドにするのも良いかもしれません。
タキシングの実験
今日は近所に行き止まりの道路を見つけて、長いタキシングの実験をしてみました。
やはり離陸しようとすると、傾いて倒れます。
ブレードのピッチを色々調整したところ、
どうやら右回りのローターの場合はマイナスピッチを付けすぎると左ロール癖、
マイナスピッチが無さ過ぎると右ロール癖が発生するようです。
適度に調整したところ倒れなくなりましたが、浮き上がろうとすると激しくドリフトします。
これはローターマストをガムテープで留めたりしているので、
いい加減な作りのせいかもしれません。(^_^;)
後で作り直します。
また、離陸時は通常機よりもかなりのパワーが必要みたいです。
もしかするとトルクロールする位の推力が必要かもしれません。
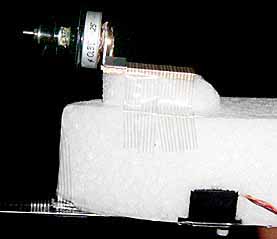
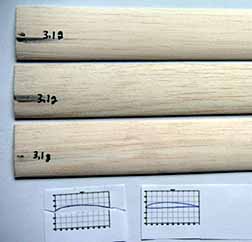
ローターを削り出す
市販のローターは大体重めで、ぷちジャイロのような軽量機には合わないような気がするので、
バルサ製のローターを自作しようと思いました。

バルサを切り出して重量を量ってみます。
同じ素材から切り出しても、ずいぶん重量差がありますね。

とりあえず同じような重量の板を2枚選びます。

紙製のテンプレートを当てながら、それらしい翼型に削ります。
抵抗の少ないブレードにしたかったので、翼型はRG15を選んでみました。

バラストとして、先端に1gのピアノ線を埋め込みました。
このバラストで重すぎるのか軽すぎるのかは、まったく不明。(笑)
手で機体を持って駆け足してみると、明らかに抵抗が少なくなっていて良く回ります。
明日インドア飛行会があるので体育館でテストしてみます。
西山さんも小型オートジャイロを作っていたそうで、見るのが楽しみです。
なんとか、ジャンプ飛行ぐらいは出来ないかなぁー。(^_^;)
体育館でテスト

私のぷちジャイロと、西山さんのジャイロ。
オートジャイロ研究では少し先輩の西山さんと色々情報交換が出来て、
大変勉強になりました。
私のぷちジャイロは、マイナスピッチを付けすぎると激しい左ロール、
ピッチが無さすぎると激しい右ロールと言う癖がどうしても抜けず、
1日中調整して2回ほど飛距離5mほどの飛行が出来ただけでした。

この写真はその時のものです。
写真だと良く飛んでいるように見えますね。(笑)

西山さんの機体も、その飛行には大変苦労していましたが、
機体を持ったまま体育館中を走り回り、
ローターの回転を充分に上げて手投げしたところ、安定した水平飛行を見せました。
しかし、この機体にはエルロンが無く、操縦性に問題を残していたと言うこともあり、
体育館内は狭すぎてUターン時のロールから回復せず、ナイフエッジ状態のまま落ちてしまいました。
西山さんの機体はエルロンさえ付いていれば、充分に実用域にあるかもしれません。
西山さんのホームページはこちら>>>
どうやらRCオートジャイロの場合、エルロンが付いてないと飛行は難しいようです。
オートジャイロは飛ばないなら飛ばないで大笑い。
少し飛んだら飛んだで大はしゃぎでした。(笑) 大変楽しいです。

推力不足のような感じもするので、現場でAC-DIYMOT-2207に交換しました。
適するプロペラを持っていかなかったので、ハサミで切って調整しました。

ロール安定が悪いのは重心が高すぎるせいではないかと考え、
脚に板ナマリを巻きつけてみましたが、まったく効果がありませんでした。 (^_^;)
ロール癖を考える
離陸直後に起きるロール癖は、
フルエルロンを切った状態で離陸する位の非常に強い回転力です。
それは、どんなにラダーを切っても回復することは出来ません。
西山さんのジャイロはピッチが0度ですが、
タキシング中ローター回転が充分でない時に離陸させようとした時に、
やはり何度も右ロール状態で転倒しそうになっています。
その後、西山さんが機体を持って体育館を走り回り、
充分にローター回転が上がった状態では真っ直ぐ飛行したところから判断すると、
ローター回転が不足している場合に、この奇妙なロール癖が発生するように思えます。
機体重量に対して、ローターが大きすぎるのも
回転が上がらない内に浮かび上がるため、良くないのかもしれません。
私の機体のローターは3mmバルサ製で大変軽く、回転数も低いので、
そのせいではないかと思います。
あとで重りを載せてシーソーヘッドにするなりして、改良してみます。
また、取り付け角0度でも高速回転できる翼型も研究してみようと思います。
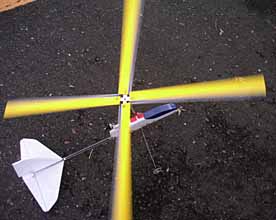
色々なブレードでテスト
今日はある程度の風があったので、
マストだけを持って各ブレードの回転力の実験を行いました。
まずは、自作フラットボトムブレードでピッチ角0度です。
最初はなかなか回りませんが、回転が上がり始めると
かなりの回転数で勢い良く回転することを確認しました。
ただ、作りが悪くバランスがどうしても取れませんので、作り直す必要があります。
クリップ400用とT-REXの対象翼型ブレードもピッチ角0度で試しましたが、まったく回転しません。
やはり、翼型に秘密がありそうです。
ほとんどマイナスピッチを付けずに回転させるためには、
フラットボトムや半対象のブレードが必要みたいです。
ラジコン技術80/6の記事によると、前進飛行中のジャイロのローターの揚力中心は、
ローターディスクの前から40%あたりにあるらしい。
また、ローターディスクの取り付け角は機体に対して+5度が最適らしい。
ローターはどうやら、この翼型が良いようです。
http://www.ae.uiuc.edu/m-selig/ads/afplots/sg6042.gif
翼根-12度、翼端-2度で10度のねじりを加えると更に良いらしい。
シーソーヘッド
アルミ板で比較的簡単に作れるシーソーヘッドを考えてみました。
ローターの傾きを変えることによって、エルロンとエレベーターの操舵が出来ます。
メタセコイヤのモデリングデータは、こちらからダウンロードできます。
オートジャイロ関係のブックマーク
私がネットで探したRCオートジャイロ関係のブックマークです。
https://sekiai.net/rc2/Petit_Gyro/AutoGyrosBookmark.htm
色々RCジャイロを見つけましたが、中でもこの機体が一番性能が良いような感じです。
http://www.mickeynowell.com/id9.html
ページの下の方にある軽量なG3POの飛び方は、
ぷちジャイロのイメージにピッタリで、大変気に入りました。
実機ジャイロのムービーの紹介
こうしてみると、オートジャイロって大変魅力的ですね。
http://www.autogyro-rc.com/user/Air%20Mail%20Kellet.WMV
エルロン操舵機構は必要か?
私がネットで調べた限り、RCオートジャイロには
ほとんどエルロンが付いていました。
西山さんのエルロン無しのジャイロが、旋回時にロールした後
回復出来ずに墜落したのを目撃したこともあり、
「エルロン無しのRCオートジャイロを開発するのは難しいのではないか」と、私は判断しました。
また、ネットで調べていて気が付いたこととして、
市販ヘリのスタビ付きヘッドを使っていないジャイロは、
ほとんどすべてが3枚ローターを使用しているということです。
RADさんのキララのページを見ても解るとおり、
2枚ローターのジャイロを作るのは非常に難しいようです。
おそらく3枚ローターで作る方が成功の近道でしょう。
あと、エレベーターはローター面を傾けることによって操舵している機体が多いです。
それらのジャイロの水平尾翼には動翼がありません。
また水平尾翼自体が無いものも多いです。
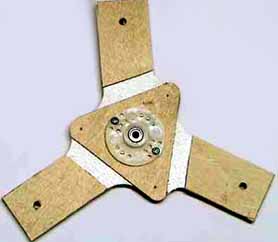
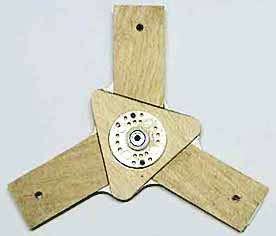
エルロンとエレベーター操作が出来るヘッドを自作
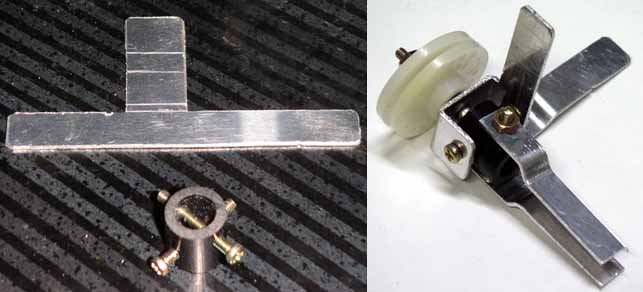
見ての通り、非常に簡単な構造になっています。
材料は1mmアルミ板・10mm径の塩ビパイプなどです。
なお、回転部分は円盤状サーボホーンの中央の穴にベアリングを押し込んだものです。

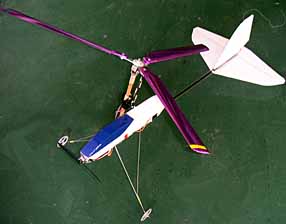
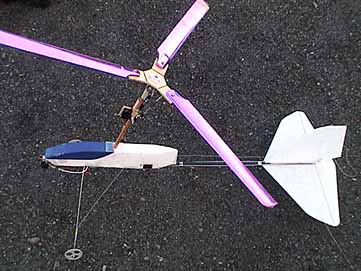
3枚ローター用ブレードをバルサから削りだす

翼型は例のSG6042です。
テンプレートを当てながら、出来るだけ正確に削りました。

オラクロームを貼ったので、まるで紫のナイフみたいに見えますね。(笑)
アイロンで熱して8度のネジリを付けてみました。

先端で2度のマイナスピッチになるように、角度調整のための角材を接着しました。
とりあえず、フラッピングでないヘッドをアルミ板で作って飛ばしてみました。
新しく作った3枚ローターは、翼型やネジリ加減など何が良かったのか分かりませんが、
早歩き程度でも大変良く回り、その揚力も素晴らしいです。
こりゃ、飛ぶかも・・・。o(^-^)o
3枚ローターテスト

推力に余裕を持たせたいのでAC-DIYMOT-VLモーターに交換しました。
モーター位置を機首に変更したので、大きなプロペラも付けられます。

早速タキシングして浮上させてみました。
しばらく滑走した後、あっさりと浮き上がったんですが、やはりロール方向が不安定です。
今回はエルロンが付いているので必死にコントロールしますが、
傾きすぎるとエルロンをいっぱいに切っても立て直すことが出来ません。
その後何回かナイフエッジ状態で墜落しましたが、
高度2mで最長10秒ほど滞空して円を画くことが出来ました。
フラッピングヘッドの自作
ハブの原寸大図面
こちらのサイトの写真を参考にさせていただきました。
http://www.autogyro.com/models/sparky.htm
私の自作ブレードとは回転方向が逆なので、図面はさかさまになっています。
フラッピングは下方向に曲がらないように制限があります。
理由は、下にしなるとテールブームに当たってしまうためです。

フラッピングヘッドのテスト


飛ばしてみると以前より多少安定が良くなり、飛行にも少し余裕が出てきました。
これなら8の字飛行が出来るかもしれません。
ただ、常に左にロールしようとしますので当て舵が必要です。
エルロントリムを合わせようとして指を離したら、
思いのほか早い左ロールであっという間にナイフエッジ状態になり墜落しました。
一本しかない6030ペラを折ってしまい終了です。
うーん。やっぱり頻繁に墜落する機体はプッシャーにしたいなぁー。 (^_^;)

どうも私のジャイロはエルロン方向の自立安定がまったく無く、
常にどちらかにひっくり返ろうとします。
テスト飛行のビデオです。
| ★ フライトビデオ ★ | ||
| O
O O RC-TV 。 |

Petit_Gyro_Test01 |
O
O O RC-TV
|
非常に操縦に苦労しているのが分かると思います。
結局一回も着陸できなかった。(^_^;)
重心が上すぎるのか、コーニング角が少なすぎるのか、ローターが軽すぎるのか、ヘッドが悪いのか、
まったく分かりません。
フラッピングによってピッチ角が変わるようにしていましたが、
もしかするとこれも良くないのかもしれません。
パワーは有り余っているはずなのに、フルスロットルでも全然上昇していかないしぃー。(T-T)
安定飛行への困難な挑戦はさらにつづきます・・・。 (笑)
羽田インドアでの飛行

羽田インドアへ持ち込み飛行させて見ましたが、やはりロール方向の安定が非常に悪く、
少し飛び上がって一回りするのが精一杯でした。 その後、瞬時に墜落。
何度やっても同じような飛行ぶりです。(笑)
最長で15秒ほどの周回飛行が出来ただけです。
でも飛んだ瞬間、皆さんの「おおーっ」と言う声が聞けただけで嬉しかったです。

飛行後、エルロンサーボにギヤ欠けが発見されました。
ローター面を傾けるためのサーボは、出来るだけ金属ギヤを使うべきかもしれません。
金属ギヤのサーボへ交換

とりあえず手持ちのNES-351に交換してみました。
1個25gなので凄く重いです・・・。(^_^;)
でも頻繁に壊れるよりいいかぁー。
(あまりにも重過ぎるので、後にやっぱり6gサーボにしました・・・)
ブレード先端に重りを付けてみる

板ナマリを巻きつけ、テープで固定してテストしてみました。
エルロンは格段にマイルドになりますが、
自立安定の無さは解消されず、やっぱりすぐに墜落します。
もっと根本的な部分に問題がありそうですね。
可変ピッチハブは必要か?
どうも機体の挙動を見ていると、極端なオーバーステアのような気がしてなりません。
エルロンを切ると、加速度的に舵が切れていきます。
あわてて反対に修正舵を打つと、瞬時に反対側にロールしてナイフエッジ状態で墜落してしまうのです。
これは単純に舵が敏感すぎる症状とは違い、送信機側でどんなにEXPを入れても
まったく改善されませんでした。
今まではフラッピングヘッドのヒンジ部分に角度を付け、
ブレードが上がるとマイナスピッチを増やして、自動的にブレードが下がるようになっていました。
しかし、エルロン操舵のことを考えていて、ふと気が付きました・・・。 (´-`).。oO
この設計だと、エルロンを動かしてヘッドを右に傾けると、
右のマイナスピッチが増え、さらに右に傾くようになっています。
なるほど、これではオーバーステアになるのは当然ですね。
そこで、ブレードが上下してもピッチ変化の無いハブを新たに作ることにしました。
原寸大
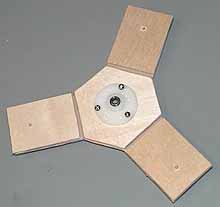
0.75mmポリプロピレン板を、1.2mm航空ベニヤでサンドイッチ。
それぞれを両面テープで貼り付けています。
飛行時間の最長記録を更新!

いつものように早起きして飛ばしてみましたが、
明らかに操縦性が良くなっているのが分かります。
以前のようにオーバーステアで四苦八苦することが無くなりました! o(^-^)o

相変わらず自立安定は皆無で、常にどちらかにひっくり返ろうとします。
「行き先は機体に聞いてくれ」と言う状態です。(笑)
でも、エルロンの利き方が素直になったのでコントロール可能です。
飛行時間は今までの最長記録を更新。
更に、今日は初めて綺麗な着陸が出来ました!
今まで、ぷちジャイロを飛ばしていてクラッシュしなかったのは初めてです。
無傷で地上に生還し、惰性でローターをクルクル回している機体を見て、
初めてRC飛行機で着陸に成功した時のような感動がこみ上げてきました・・・。 (T-T)
あとは、自立安定性を向上させるための改良をしてみようと思います。
| ★ フライトビデオ ★ | ||
| O
O O RC-TV 。 |

|
O
O O RC-TV
|
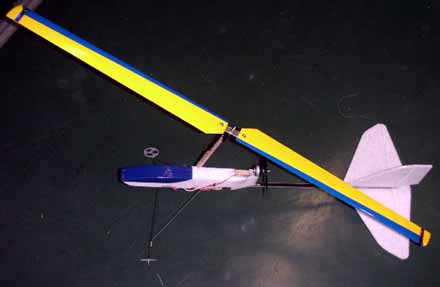
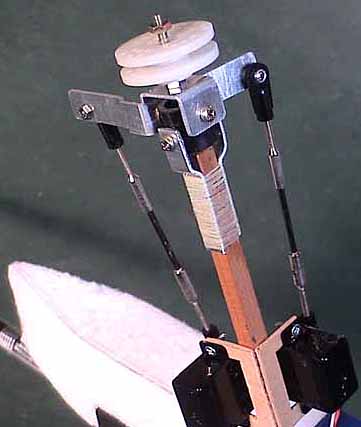
マストの角度とローターの高さ
マストが寝すぎているように見えるので、垂直に近い状態まで起こしてみました。
すると、見違えるように安定感が増し、ある程度思った通りの経路を飛ぶことが出来るようになりました。
エルロン操作のタイムラグはあるものの、少し位ならば手放しでも水平飛行します。
8の字飛行+着陸は楽勝です! o(^-^)o


今日はローターの高さを変えて、どのように飛行特性が変わるかを調べて見ました。
この機体のマストは胴体のEPPブロックに刺しているだけなので、その場で簡単に高さ調整が出来ます。
色々実験してみると、ローターの高さは
スロットルアップによる頭上げに大きく影響することが分かりました。
高すぎるとフルスロットルによる激しい頭上げで操縦できなくなります。
エレベーターフルダウンでも水平になりません。
低すぎるとスロットルアップでも頭を上げないのですが、スロットルを上げる時は上昇したい時なので、
同時にエレベーターのアップ操作が必要になり、飛ばしにくくなります。
また、自立安定も悪くなるようです。
試行錯誤の結果、この高さがちょうど良いようです。
スロットル操作で穏やかに頭を上げて高度を上げることが出来ますし、
フルスロットルでも棹立ちになることもありません。
これはもちろんこの機体の場合なので、
モーターの位置やダウンスラストの角度が違う機体では、まったく変わってくるはずです。
マストの角度は、
この写真を見てもエレベータートリムが少しアップ側になっているので、
もう少し寝せた方が良いようです。
オートジャイロ自作のアドバイス
普通の飛行機にローターを付けて、だんだん主翼を小さくしていくのが
一番の成功の近道だと思います。
オートジャイロは、ある日突然飛ぶようになります。
天国と地獄の境目が無い感じですね。(笑)
オートジャイロの自作では、どうしてもヘッド回りだけに注目してしまいますが、
ローターとプロペラの位置関係は、それ以上に重要みたいです。
私の機体も、ローターを低くしてマストの角度を起こしたとたんに、
今までの不安定さが嘘のように良く飛ぶようになりました。
浮いたとたんに強烈な頭上げでスピードが落ち、
左右不安定など操縦不能になる場合には、
ローター位置を下げたり、ダウンスラストを思い切り付けたりして調整してみてください。
オートジャイロが飛んでいる時のローター面の迎え角は
思いの他小さくて、ほとんど水平と言って良い位です。
ですから、ローターをあまり後ろに傾けると極端に不安定になります。
上から見て右回転のローターは左に倒れようとするみたいなので、
プロペラの反動トルクを打ち消すように左回転の方がいいかもしれません。
私が見た感じでは、プロペラの反動トルクに関しては、
皆さん特に対策はしていないようです。
ワンローターのオートジャイロでは、
離陸時にロールしてしまう現象が発生することが多いですが、
これはプロペラの反動トルクの影響というよりも、
ローターから発生する揚力が左右で違うためだと考えられます。
なぜなら私が実験した結果、プロペラを大きくしても小さくしても、
またスロットルを上げても下げても、ロールする現象はほとんど変わりなかったからです。
強いロール癖が発生する原因としては、ローター回転数の不足、
ブレードピッチが不適切、ローター面の迎え角が大きすぎる、
ローターとプロペラ軸間の距離がありすぎて
スロットルアップで強い頭上げになるため、などが考えられます。
浮き上がった瞬間に頭上げになってスピードがガクッと落ちるようでは、
ローター面の迎え角が大きすぎます。
通常の機体(高翼の練習機)のように、滑走時と同じスピードで離陸が
出来るように調整すると見違えるように左右安定も良くなります。
あと、ワンローターのオートジャイロは左右非対称の乗り物ですから、
通常飛行時にエルロントリムがずれた状態で水平飛行していても、
あまり気にしなくても良いと思います。
私が実験した結果では、かなりユルユルのフラッピングヘッドが必要です。
それは地上でローターがダラーンと下がる位です。

katayamaさんのヘッドが高性能だと思いますので、
これをお手本にするといいでしょう。
重心位置はローター面の真下がいいでしょう。
ヘッドを持ってマストと同じ角度に傾く位で良いと思います。
エルロンはかなりの大舵角が必要です。
ローターが20度〜30度程度傾いてもかまわないので、
機体が倒れないように強引にトリム合わせして飛ばしてみてください。
気温とヒンジの弾性
今朝は大変冷え込んで、車の窓に霜がおりるほどでした。
いつものようにジャイロを飛ばしてみると、非常に安定が悪く、
「うーん・・・なんでだろ?」と思っていました。
何の気なしにブレードを上下させてみると、
ポリプロピレン板で作ったフラッピングヒンジが
硬くなってガチガチになっていました。(^_^;)
これから気温が特に下がってきますので、
プラスチックの弾力を利用したヒンジは硬くなる可能性があり、注意が必要です。
ループに挑戦
AC-DIYMOT-2207の3セル仕様にしてパワーアップし、
ループに挑戦してみました。
ある程度癖があるのですが、わりと簡単にループできます。
その後水平尾翼のエレベーターもミキシングさせたら、
超小回りでフリップみたいにループできるようになりました。(笑)
調子に乗ってロールにも挑戦しましたが、
崩れたバレルロールみたいはことは出来るようです。
パワーがあるので、70度の頭上げ姿勢で
風に向かってホバリングさせるのがとても面白いです。
棹立ち状態ではラダーの面積が不足しているようなので、もっと大きくする予定です。
| ★ キングオブオートジャイロ賞に関する記事は、
自作RCオートジャイロ大全集のページを見てください>>> |