製作者:実験工房Sekiai

(動画はこのページの一番下にあります)
製作者: B.西山さん
1号機
上空飛行に成功!
ホームページ (動画あり)
http://www.geocities.jp/cre_yah/index.html
製作者: Fさん
1号機


西山さんのホームページに11月末まで動画が置いてあります。
http://www.geocities.jp/cre_yah/index.html
製作者: 北尾さん
ホームページ
http://kit01.blog15.fc2.com/
製作者: 秋田さん

秋田さんは実機オートジャイロの専門家だそうです。
タキシング時に、糸を使ってローターの予備回転を稼ぐアイディアは凄いです。

製作者: GOTOさん

数年前からオートジャイロに取り組んでいて、これは5年前に作った機体。
8の字飛行に成功!
未明さんのサイトの該当ページ (動画あり)
http://www.mimei.jp/~nishiyama/epp-wings20.htm#192
製作者: katayamaさん
1号機


自作フラッピングヘッド
フラッピングヒンジは軽く動いた方が安定がよくなるようです。
さらに何人かの方が言われているように、2ローターの場合
ヒンジにガタがあると振動が発生してローター回転があがりません。
そこでガタがなく軽く動くヒンジが必要になってきますが、
外径3mmのアルミパイプと内径3mmの銅パイプをすり合わせることで解決しました。
このヒンジの構造はかなり昔のラジコン雑誌にあったものです。
写真では詳しい構造がわかりにくいので断面図を添付します。
2号機

大まかな変更点
翼型をSカンバーに、プッシヤー方式をトラクター方式に、
水平尾翼に翼端上半角を設定、ローター面積を拡大
アウトドアで8の字飛行+着陸に成功!
動画
http://www.youtube.com/watch?v=U57ubDkmzMo
インドアで8の字飛行+着陸に成功!
動画
http://www.youtube.com/watch?v=Fsxzj687uaM
製作者: Yamawakiさん
1号機

ローターはバルサ削り出し
フラッビング材は1ミリ厚PPシートでピッチ変化あり(上がるとピッチ小)
操縦は前後左右のローターの傾きとラダー。
ローターの支持にはRCカー用のユニバーサルジョイントを使用。
動画
http://www.youtube.com/watch?v=TEWtu6zNd7I
2号機

上空飛行に成功!

3号機


2号機のピッチ不安定をふまえ、テールを延長。
ピッチ制御をテールのエレベータに移動。ローターは左右のロール制御のみ。
ローターは市販の400クラス用を使用しました。
ジャイロセンサーは使用してますが必要ない感じ。今度は無しでやってみます。
重量は約300g
モーターはハイペリオン220538ターン
バッテリーはホーネット730ー3セル
エルロントリム0度で真っ直ぐ飛ぶらしい。凄い機体です。(^_^;)
アウトドアで離陸+8の字飛行+着陸に成功!
動画
http://www.youtube.com/watch?v=Zw0laFDht_o
製作者: ニシさん
1号機
1号機改良版
300mのリポ積んで163g
2号機
2号機が飛びました。
今朝、Yamawakiさんご指導のもと、出勤前に会社近くの公園で初めて「飛行」と言えるくらい飛びました。
昨日までの数十回にわたる滑走テストと墜落の繰り返しで得たデータにより、
今朝は飛ばす前から少し手ごたえは感じていました。
大きな円の半周くらいですが当て舵も効いて、高度3mくらいでしょうか。
最後は墜落でメインギヤーが取れてしまい終了となりました。

ご苦労されている方々に少し参考になれば・・・・・。
1.エルロンは水平では、機体は水平に飛びません。
2.滑走を繰り返して、自然に機体が飛び上がろうとするエレベーターの
ニュートラル位置を回数を重ねて慎重に探します。
正しいニュートラルを決めることが出来ず、
頭を上げすぎて失速したり滑走時に前につんのめったりの繰り返しで
ずいぶん余分な時間を使ってしましました。
私の機体のニュートラルは、写真のローター角度よりまだ少し右で、少しアップ側です。
機体により異なると思うので、あくまで参考に!
ちなみにローター回転方向は右(時計回り)で、かなり柔らかめのフラッピング機構付です。

動画
http://www.youtube.com/watch?v=740FyN81_rE
----------------------------------------------------

胴体がスヌーピーの顔に似ていたので「ポチ丸」と命名しました。
最初、パワーユニットをフィガオのFG-1220-SETギヤダウンで130gで仕上がってましたが、
パワー不足で離陸できず、結局以下のようなスペックとなりました。
屋外のせいもあるかもしれませんが、ジャイロは重量比でファンフライ機の2倍以上パワーが必要と感じました。
出来るだけ簡単なローターを作りたくて、1号機に付けていた1.5mm厚のバルサ板を
フィルムとグラステープだけで補強したものがあったんですが、フニャフニャで使えませんでした。
で、これを1.5mmのカーボンロッドで補強して、
ピッチはYamawakiさんから学んだグラステープ3枚重ねのみで飛ぶことが出来ました。
今回いろんな部分で、おさむさんの機体を参考にさせていただきました。ありがとうございました。
【ポチ丸スペック】 |
製作者: 小野寺さん

全長 400ミリ
全幅 160ミリ
モーター Rcar手巻き
ローター T-rex用315
ローターヘット ハニービー(リンクはピッチ調整試験用)
マスト受け GWSギアケース
ホームページ
http://okiyomi.hp.infoseek.co.jp/
製作者: おさむさん
1号機
重量150g(リポ37g込み)
ローター径600mm
ブレード幅38mm
チップウエイト2g
メカはGWS-PICO受信機・サーボ
PHNX10、ミキホビーCD-ROMモーター
E-TEC700mAh2sリポ
APC8x3.8ペラ
チルト部分は1mm航空ベニヤ、胴体は3mmバルサ、ブレードは3mmスチレンペーパーPPテープ貼りです。

オートジャイロできました。動画を見てください。
少し風があったので1回目は着陸に失敗しますが2回目はうまくいきました。
左右旋回クセなし。オートロ降下も安定してます。
「トレーナー機が飛ばせる人なら飛ばせる」になってます。
小回りもきくしインドアのほうが風がない分楽かも。 これからも次々開発していきます。
動画
http://www.youtube.com/watch?v=hl3g7XxUOVQ
-----------------------------
2号機

インドア対応です。スローフライ、コブラできます。
アウトドアで少し向かい風があればホバリングもできます。
動画
http://www.youtube.com/watch?v=xdhSgzkJWL4
動画ではかなり抑えて飛ばしてますが、
急上昇できるパワーもあるのでアクロもできそう。
操縦方法は3ch。
ローター軸チルト左右のみ(エルロン)とエレベーター舵面、スピコンです。
データは重量150g(リポ37g込み)、
ローター径580mm、
ブレード幅45mm、
チップウエイト2g。
メカはGWS-PICO受信機、
サーボはGWS-PICOとハイペリオン3.7g、
PHNX10、
ミキホビーCD-ROMモーター、
E?TEC700mAh2sリポ、
APC7x4ペラです。
ブレードは3mmバルサ削り出しフラットボトムPPテープ貼り
+10mm幅プラスチック板製フラップ、
フラッピングヒンジは0.75mmPP板25mm幅、
チルト部分は1mm航空ベニヤでヒンジは0.2mmPP、
胴体とマスト部分は5mmスチレンペーパーPPテープ貼り、
尾翼は2mmスチレンペーパー、
ローター軸と脚は1.2mmピアノ線、
ローター軸受けはスチロール樹脂パイプ、
車輪は硬質EPPでアルミワッシャをエポキシで止めてます。
-----------------------------
3号機
3号機は運動性を良く、ラダーも付けて4Chにしました。
重量は360mAhリポ込みで150g。
素材は胴体が6mm、尾翼が3mm60倍EPPで全面にPPテープ貼り。
パーツ類は2号機の使い回し。ローター径530mm、
ブレードは幅40mm、4mm厚バルサ削り出しフラットボトムPPテープ貼り。
チップウエイト無し、フラッピングヒンジ無しです。
動画
http://www.youtube.com/watch?v=3Xf3fLcWEOM
-----------------------------
4号機


タキシング、離着陸、バレルロール、ループ、ストールターン、コブラ、
ホバリングからバック、オートロ、定点着陸などいろいろ楽しめます。
重量は370mAh2セルリポ込みで160g、
ローターは径530mm、ブレード幅60mm、
2mmスチレンペーパーにPPテープ貼りシングルサーフィス、
フラッピング無し、チップウエイト1g。胴体は6mm、尾翼は3mm60倍EPP全面PPテープ貼り。
動画
http://www.youtube.com/watch?v=TNxKKHAMZ7w
製作者: EPPプライマスさん

尾翼のみの操舵で見事に飛行するオートジャイロ。
水平尾翼を利用したエレボンは合理的で素晴らしいアイディアですね。
これなら、ローター面を傾けるための面倒な工作をする必要がありません。
機体はスチレンペーパー製。
ローターは、スチレンペーパー&1mmバルサ裏打ち。
安定していて飛ばし易い機体だそうです。
エレボンは離陸時と姿勢を崩した時の回復に使うようです。
飛行は無・微風時が安定し飛ばし易いとの事ですが、
風がある時の方がローターの回転が上がり短距離離陸し易いようです。
動画
ハンドキャッチと小山にピンポイント着陸は必見!
http://www.youtube.com/watch?v=JzSBiR43vts
製作者: たけてぃさん
なんちゃジャイロV4


なんちゃジャイロV7 「こぶりゃ」


ホームページ
http://www.oidenansho.com/
| 未明さんのサイトのジャイロ杯のページはこちら>>> |
キングオブオートジャイロに挑戦
2005年11月12日横須賀で行われたインドア飛行会で、
キングオブオートジャイロの規定飛行(室内での8の字飛行+着陸)に挑んだ
RCオートジャイロたちです。

いままで自作機としての前例がほとんど無い純粋なオートジャイロが、
一気に4機も集まることはまったく予想できませんでした。
「難しい機体にあえてチャレンジする」と言う、皆さんの情熱は凄いですね! o(^-^)o

しかも、1ヶ月前では浮くことも困難で、広いアウトドアでさえも上手く飛ばず、
「室内での8の字飛行を達成するためには数ヶ月はかかるだろう」と言う大方の予想を裏切り、
3機が規定飛行を難なくクリアーするという、驚くべき結果になりました。
今回の参加機体
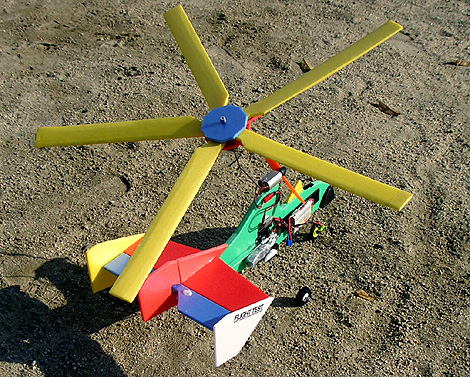
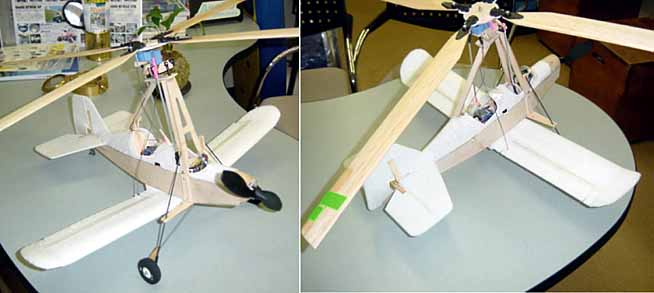
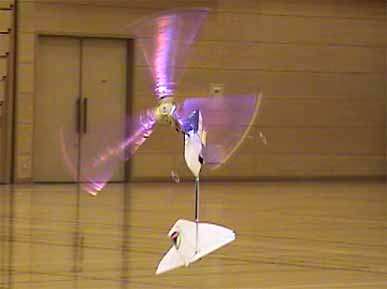
GOTO機

今回集まった機体の中でもダントツ1位の、驚くべき完成度を持つRCオートジャイロです。
私も操縦してみましたが、高翼の練習機を飛ばせる人なら、
だれでも容易に操縦できるほどの素晴らしい操縦性と安定性を持っていて、
このままキットとして市販できるのではないかと思えるほどです。
私は「ワンローターのオートジャイロは操縦に癖があるのが当然」と考えていたので、
これほど操縦しやすいオートジャイロの自作が可能だということが分かり、嬉しく思いました。


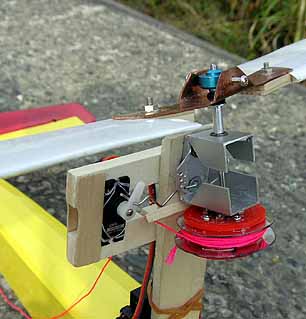
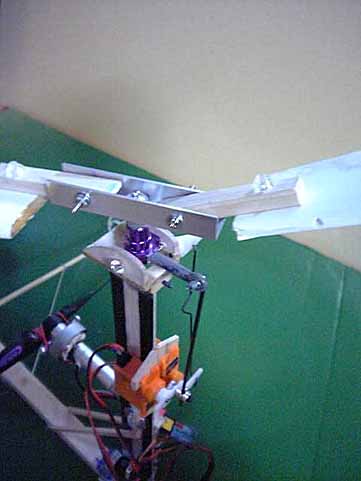
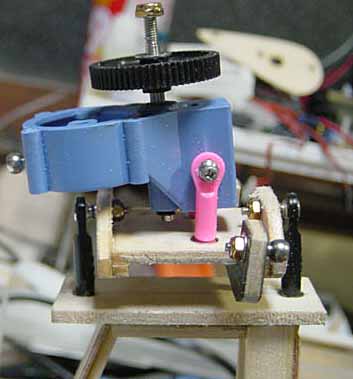
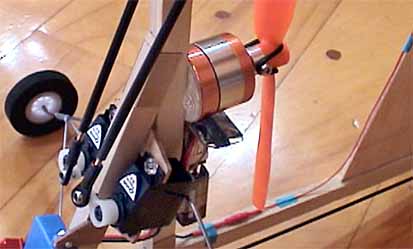
柔らかいプラスチック板を使った単純なフラッピングヘッドを持っていて、
サンワ製の6方向に腕のあるサーボホーンをうまく使い、
中央にベアリングを埋め込んでハブにしています。
マイナスピッチ角は1度以下(0.5度位?)、翼型はフラットボトムです。
幅広ローターブレードによる充分な浮きと、先端のバラストを持たない短めのブレードによる、
タイムラグのほとんど無いダイレクトな運動性を両立しています。
ちなみに、尾翼やブームが簡単に取り外し出来て、
非常に小さな箱に入れて持ち運べるのも、この機体の特徴でしょう。
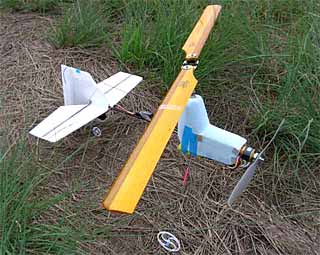
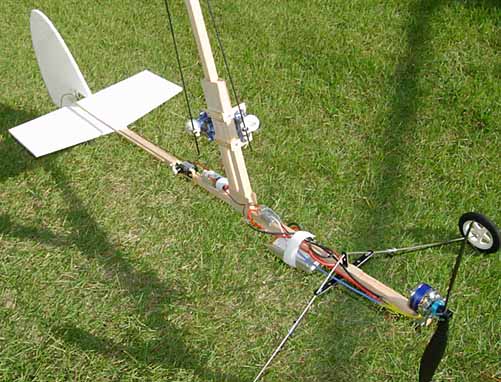
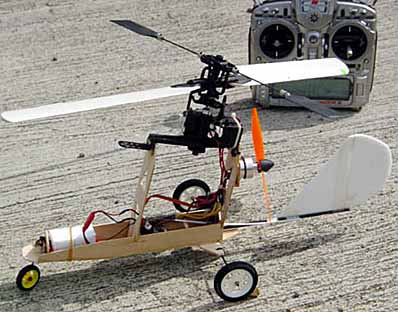
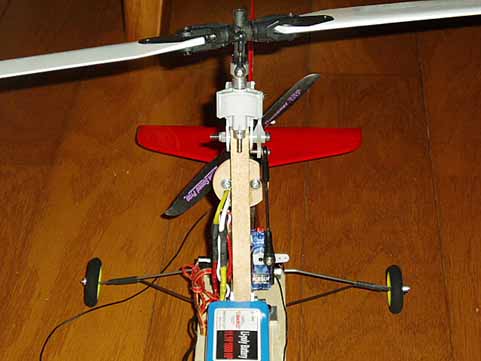
F機 (2号機)

RCヘリの知識と工作に関してはプロレベルのFさんは、
なんとスタビ付きのヘッドを持つオートジャイロを自作してきました。
ちなみに、パイロット人形は飛行時に外します。
他の参加機よりも1回り大きくて重量もあり、基本的にアウトドア用の機体と思われるため、
狭い体育館での8の字飛行は難しそうでしたが、きちんと8の字飛行+着陸をクリアーしました。
この機体は、おそらくアウトドア飛行では無敵なのではないでしょうか?

操舵機構から考えても、操縦の自由度という点ではこの機体が一番でしょう。
明日は「アウトドアでロールとループに挑戦する」といっていましたが、
この機体ならば可能かもしれません。
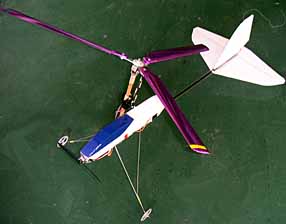
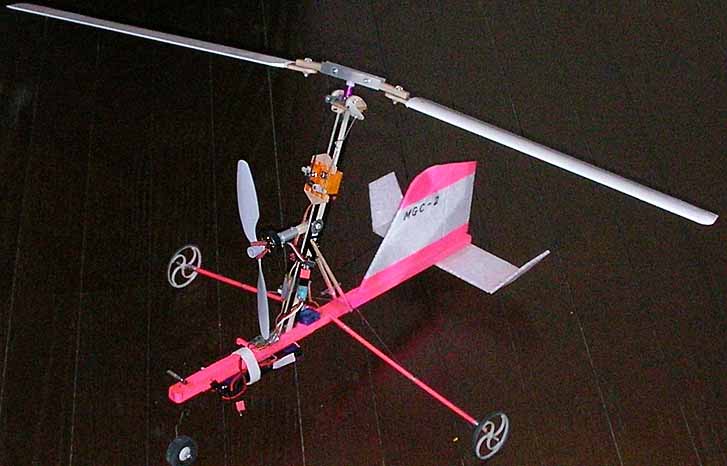
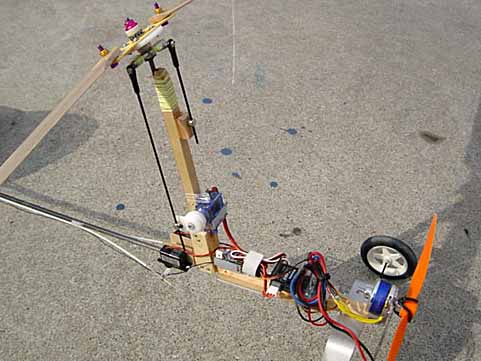
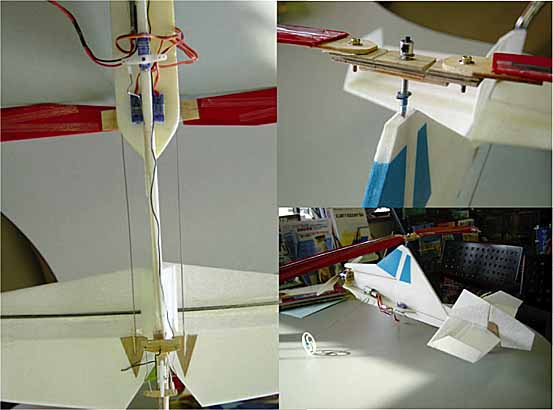
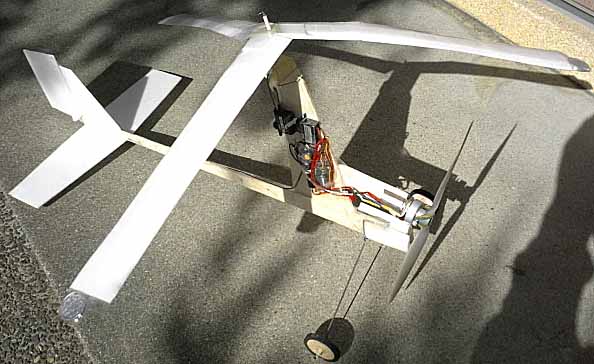
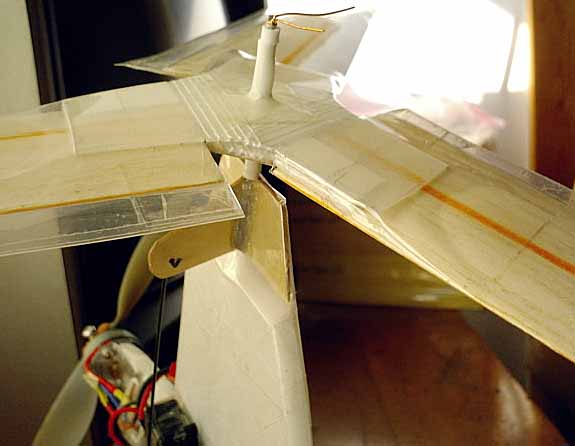
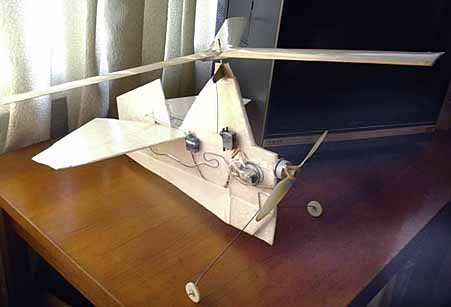
B.西山機 (2号機)

電動ヘリで凄い3Dをこなし、ヘリの理論にも詳しいB.西山さんは、
当日深夜2時に完成したと言う新作機を持ち込みました。
低解像度の写真では分からないかもしれませんが、工作が緻密で工芸品のように綺麗な機体なので、
部屋に飾っておいてもオシャレではないかと思いました。

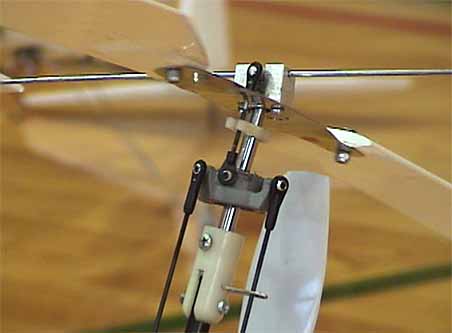
フラッピングによるピッチ変化をもつハブを持っています。
実機と同様の操舵機構を持ち、送信機の設定はエレボンになります。
ラダー連動の前輪を持ち、いさぎよく水平尾翼は無し!です。
タキシングテスト、ジャンプ飛行などで順調に飛行距離を伸ばしていましたが、
途中で受信機トラブルにより惜しくもリタイヤとなりました。
浮きと安定性にはまったく問題ないので、次回は必ず良く飛ぶと思います。
Sekiai機

私のぷちジャイロは、
タキシングから容易に離陸できる機体としては、他機よりも一歩抜きん出ていると言えますが、
操縦安定性とトータルバランスにおいてGOTO機に一歩譲ります。
この日私は、GOTO機という素晴らしい目標が出来ました。
これから少しずつ改良していこうと思います。
満足いく操縦性になった後は、ループやロールと
コブラ飛行に挑戦!ですね。 楽しみは尽きません。(笑)
キングオブオートジャイロビデオ
| O
O RC-TV 。 |
|
O
O RC-TV
|
キングオブオートジャイロ賞、クイーンオブオートジャイロ賞決定!
私はたった一ヶ月でここまで多数のオートジャイロが
飛行に成功するとは思っていませんでしたし、
皆さん一生懸命考えて素晴らしい自作オートジャイロを製作したこともあり、
最優秀の1機を決めるのは非常に難しいです。(^_^;)
ですから、キングオブジャイロ(インドア8の字+着陸)は、
2005年11月までに達成して動画で証明できた全員で、商品を分けることにします。
プチトレーナーとマイティベアは自作機専門の私やFさんは特に必要ないと思うので、
EPP機の経験が無いGOTOさんにはぷちトレーナー、
KATAYAMAさんにはマイティベアをあげることになりました。
|
★★キングオブオートジャイロ賞★★
|
クィーンオブジャイロ(アウトドア8の字+着陸)は、
あまりにも沢山の達成者がいることですし、商品の数にも限りがあるので、(笑)
一番最初に達成したkatayamaさんにあげようと思います。
|
★★クイーンオブオートジャイロ賞★★
|
オートジャイロがある程度自由に飛行出来るようになると、新たな目標が必要になります。
そこで、オートジャイロ用パターンを考えてみました。
これに関して特に賞はありませんが、チャレンジしてみると面白いと思います。
私のぷちジャイロは、上手く操縦すると何とか可能です。(^_^;)
-----------------------
地上から離陸
直線水平飛行
ループ2回
ストールターン
バレルロール1回
キューバンエイト
180度オートロ+定点着陸、
-----------------------
インドアでのフライトビデオ
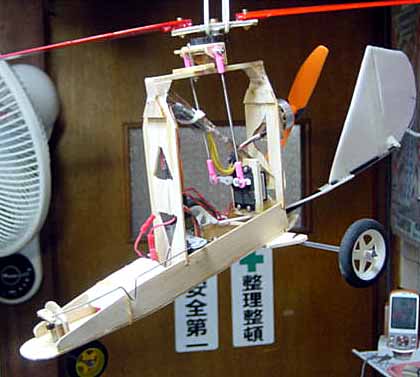
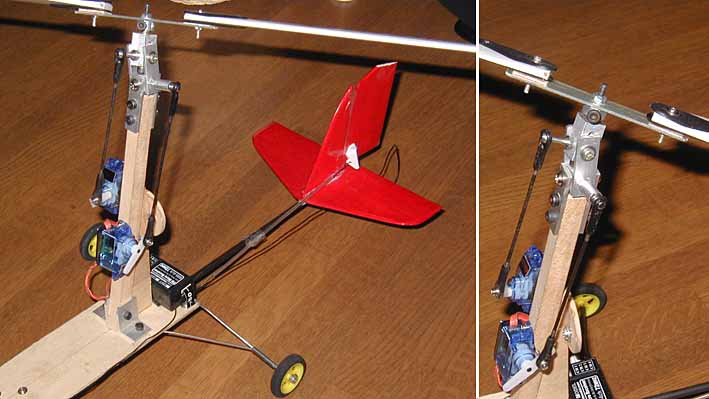
Fさんのオートジャイロ(3号機)
| O
O RC-TV 。 |

|
O
O RC-TV
|
スタビライザーを廃止して3ローターになり、各部の軽量化もして、
更に飛行性能が上がりました。
フラッピングしない固定されたヘッドを持っています。
今度はパイロット人形が乗っていても、楽々飛行が可能です。
私のぷちジャイロ
| O
O RC-TV 。 |
Petit_Gyro02 |
O
O RC-TV
|
体育館でループとロールに挑戦しました。
この機体はロール安定の悪さを逆に利用して、スナップロールのように早いロールができます。(笑)